Dwa lata temu weszła w życie dyrektywa maszynowa nakazująca zapewnienie pełnej stateczności pojazdu, niezależnie od stopnia rozsunięcia nóg podporowych żurawia, co wymusza wykorzystanie drugiego ważnego parametru pojazdu – jego masy. Aby spełnić te wymagania firma HMF wykorzystuje system o nazwie Electronic Vehicle Stability.
Łącząc dwa kluczowe parametry (stopień rozsunięcia belek nóg podporowych żurawia oraz uwzględniając dynamicznie masę pojazdu) duński producent żurawi hydraulicznych firma HMF oferuje opatentowany system EVS (Electronic Vehicle Stability), który wymienioną wcześniej dyrektywę maszynową spełnia już od 13 lat, a dodatkowo jest zgodny z europejską normą EN 12999 oraz z normą EN 280 dotyczącą mobilnych koszy osobowych.

Pomiar stabilności prowadzony jest na bieżąco
podczas pracy żurawia
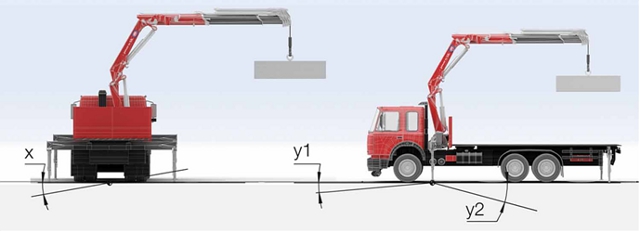
System EVS różni się od innych systemów bezpieczeństwa przede wszystkim tym, że dokonuje obliczeń ogólnej stabilności pojazdu na bieżąco –
z uwzględnieniem stopnia rozsunięcia nóg podporowych – oraz wykorzystuje ładunek znajdujący się na samochodzie – mierząc całkowitą masę pojazdu, dzięki czemu możliwe jest wykorzystanie pełnego zakresu pracy wokół pojazdu (także nad kabiną kierowcy) – 360 stopni. Przy obliczaniu stabilności, EVS bierze pod uwagę wszelkie rzeczywiste parametry: wysuw żurawia, obciążenie, całkowitą masę pojazdu w tym ładunek dociążający samochód, nachylenie drogi. Dzięki analizie w/w danych, EVS jest w stanie przewidzieć w jaki sposób ruchy żurawia wpłyną na całkowitą stabilność pojazdu.
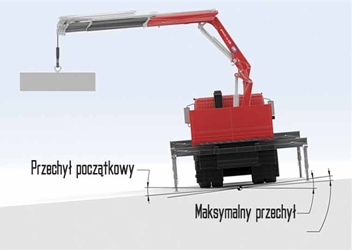
Najważniejsze jest to, że stabilność pojazdu jest wyliczana na bieżąco – nie jest parametrem statycznym ustawianym jeden raz na stałe w zależności od stopnia wysunięcia nóg podporowych. Dzięki temu żuraw osiąga większy zasięg, a co za tym idzie pełen zakres pracy – 360 stopni wokół pojazdu. Oznacza to, że EVS opiera się na rzeczywistym obciążeniu pojazdu, a nie na teoretycznym obliczonym parametrze odpowiedzialnym za zmniejszenie ruchów żurawia. Inaczej mówiąc korzystając z ładunku na skrzyni żuraw będzie w stanie osiągnąć jeszcze więcej ponieważ oblicza rzeczywistą, a nie teoretyczną stabilność pojazdu. Kiedy EVS zarejestruje przejście granicznego przechyłu, system automatycznie zmniejsza prędkość ramion i aktywuje sygnał ostrzegający, a docelowo blokuje ruchy zwiększające moment udźwigu – czyli wszystkie ruchy niebezpieczne. Obsługa żurawia staje się bezpieczna pozwalając operatorowi skupić się całkowicie na rozładowywanym ładunku, stojąc od samochodu często kilkadziesiąt metrów.






Komentarze